📌 예상 문제 & 모범 답안
1. Affine Transform과 Perspective Transform의 차이를 설명하시오.
답:
• Affine: 평행선 유지, 비율 보존. 회전, 이동, 확대/축소, shearing 포함. 행렬 크기 2×3.
• Perspective: 원근 반영, 평행선이 소실점으로 수렴할 수 있음. 3×3 Homography 행렬로 표현.
• 즉, Affine은 단순 변환, Perspective는 원근효과까지 포함.
⸻
2. Depth of Field(DOF)에 영향을 주는 요인을 설명하시오.
답:
• 조리개 크기 ↓ → DOF ↑ (깊게 초점 잡힘)
• 조리개 크기 ↑ → DOF ↓ (얕게 초점 잡힘)
• 초점 거리 ↑ → 배경 흐림 ↑, DOF ↓
• 초점 거리 ↓ → DOF ↑
⸻
3. Prewitt, Sobel, Derivative of Gaussian(DOG) 필터의 차이를 설명하시오.
답:
• Prewitt: 간단한 마스크, 잡음에 취약, 연산량 적음.
• Sobel: 가중치 포함, Prewitt보다 잡음 억제 잘함.
• DOG: Gaussian smoothing + 미분 결합, 잡음 억제 + 에지 검출 동시에 가능.
⸻
4. Canny Edge Detector의 주요 단계 4가지를 쓰시오.
답:
1. Gaussian 필터 → 노이즈 제거
2. Gradient 크기·방향 계산
3. Non-maximum suppression → 가장자리 얇게
4. Hysteresis thresholding → 이중 임계값으로 edge 연결
⸻
5. Harris Corner Detector의 원리와 특징을 설명하시오.
답:
• 원리: 코너 영역은 모든 방향으로 이동했을 때 큰 intensity 변화가 나타남 → 고유값 λ1, λ2 모두 큰 경우 코너로 판단.
• 특징: 회전 불변, 하지만 scale 변화에는 취약.
⸻
6. SIFT와 SURF의 공통점과 차이점을 설명하시오.
답:
• 공통점: 특징점 검출 + 불변성(회전, 크기) 확보, 특징 서술자 생성.
• 차이점:
• SIFT: Difference of Gaussian(DoG) 사용, 계산량 많음, 128차원 벡터.
• SURF: Hessian matrix 근사, 속도 빠름, 64차원 벡터.
⸻
7. RANSAC 알고리즘의 절차를 설명하시오.
답:
1. 임의의 샘플 점 선택
2. 모델 추정 (예: homography)
3. Inlier 개수 계산
4. 반복 후, inlier가 가장 많은 모델 채택
⸻
8. Homography의 정의와 활용 예시를 쓰시오.
답:
• 정의: 두 평면 사이의 투영 변환을 나타내는 3×3 행렬.
• 활용: 이미지 정합(panorama stitching), bird’s-eye view 변환, AR marker alignment, 문서 보정.

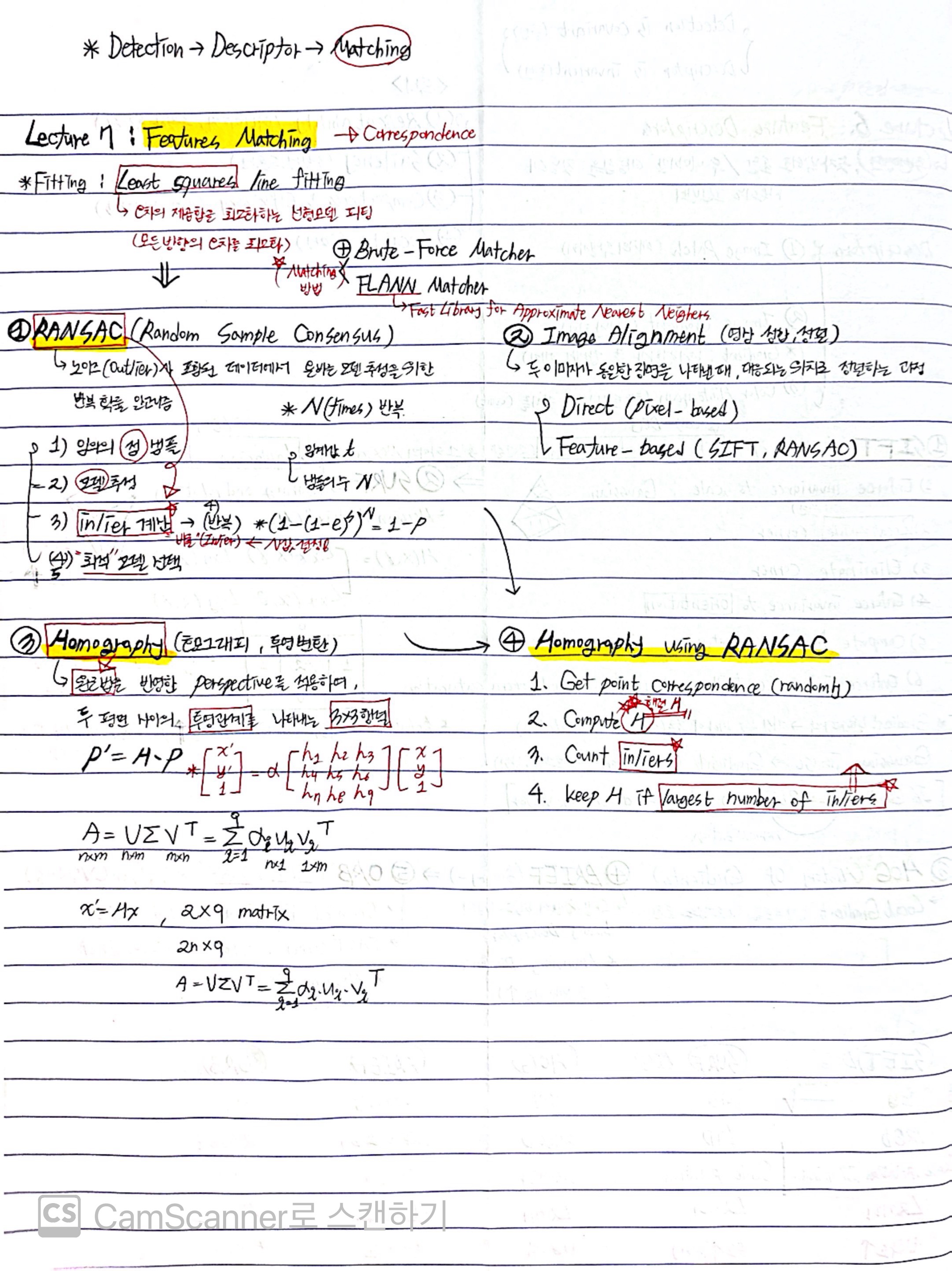
CV2025-2-07. Feature Matching & Homography - part1
1️⃣ RANSAC (Random Sample Consensus)
- 정의: 노이즈(Outlier)가 포함된 데이터에서 올바른 모델을 추정하기 위한 반복적 확률 알고리즘
- 핵심 아이디어:
- 임의의 점 샘플 → 모델 추정 → inlier 계산 → 반복 → 최적 모델 선택
- 출제 포인트:
- RANSAC 절차 5단계
- 장점·단점
- 파라미터(반복 횟수 N, 임계값 t, 최소 샘플 s, inlier 수 d) 의미
- 관련 슬라이드: 12–24쪽
- 예상 문제 예시:
- “RANSAC 알고리즘의 절차를 단계별로 기술하시오.”
“RANSAC이 Least Squares 방법보다 강인한 이유를 설명하시오.”
2️⃣ Least Squares vs Total Least Squares
- Least Squares: 오차의 제곱합을 최소화하는 선형 모델 피팅
- 문제점: 수직 방향 오차만 고려 → 회전 불변 X, 이상치에 취약
- Total Least Squares: 모든 방향의 오차를 최소화 → SVD로 해 구함
- 관련 슬라이드: 6–10쪽
- 예상 문제:
- “Least Squares의 한계점을 설명하고, Total Least Squares로 개선되는 점을 서술하시오.”
팁 💡
“세로선(Vertical line)에 대해 Least Squares가 실패한다”는 문구는 거의 반드시 언급됩니다.
3️⃣ Feature Matching (특징 매칭)
- 정의: 두 이미지에서 같은 물체나 영역을 나타내는 특징점을 찾는 과정
- 핵심 개념:
- Descriptor (예: SIFT, ORB, SURF)
- Matching 방법: Brute-Force vs FLANN
- 거리 계산: L2 distance, ratio test (Lowe’s ratio test)
- 관련 슬라이드: 25–27, 67–69쪽
- 예상 문제:
- “Brute-Force Matching과 FLANN Matching의 차이를 설명하시오.”
“Lowe의 ratio test가 왜 필요한지 설명하시오.”
4️⃣ Image Alignment (영상 정합, 정렬)
- 정의: 두 이미지가 동일한 장면을 나타낼 때, 대응되는 위치로 정렬하는 과정
- 접근 방식:
- Direct (pixel-based)
- Feature-based (SIFT, RANSAC 기반)
- 관련 슬라이드: 28–36쪽
- 예상 문제:
- “Direct Alignment와 Feature-based Alignment의 차이를 비교하시오.”
5️⃣ Homography (호모그래피, 투영 변환)
- 정의: 한 평면을 다른 평면으로 사상(mapping)하는 3×3 변환 행렬x′=Hxx' = Hx
- 사용 조건:
- 장면이 평면(Planar Scene)일 때
- 깊이 변화가 거의 없을 때
- 카메라 회전만 있을 때 (동일 중심)
- 관련 슬라이드: 46–48쪽
- 예상 문제:
- “Homography가 유효한 세 가지 조건을 설명하시오.”
“Homography 행렬 H의 의미를 기술하시오.”
6️⃣ Homography 추정 (Estimation of H)
- 방법:
- 점 대응쌍 4쌍 이상 필요 (8개의 방정식 → 8 unknowns)
- 선형 방정식 Ax=0 형성
- SVD로 해 구함 (가장 작은 singular value에 해당하는 벡터)
- 관련 슬라이드: 49–55쪽
- 예상 문제:
- “Homography 행렬을 추정하기 위한 최소 대응점 수는?” (정답: 4쌍)
“SVD를 사용해 H를 구하는 이유를 설명하시오.”
7️⃣ Homography + RANSAC 통합 적용
- 아이디어: 매칭된 점 중 이상치(outlier)가 있으므로,
RANSAC으로 inlier만 사용해 H를 계산 - 과정:
- 임의 4점 선택 → H 계산 → inlier 계산 → 반복 → 최적 H 선택
- 관련 슬라이드: 58–66쪽
- 예상 문제:
- “RANSAC을 이용하여 Homography를 추정하는 과정을 서술하시오.”
8️⃣ Image Stitching (영상 이어붙이기)
- 정의: 여러 장의 이미지를 변환(H)과 정합을 통해 하나의 파노라마로 합성
- 과정:
- 특징점 검출 및 매칭
- RANSAC으로 H 계산
- Warp & Blend (cv2.warpPerspective, multi-band blending 등)
- 관련 슬라이드: 70–78쪽
- 예상 문제:
- “Image Stitching의 전체 파이프라인을 설명하시오.”
“Seam removal과 Multi-band blending의 목적은 무엇인가?”
📘 추가로 짧게 정리해두면 좋은 개념들
| Affine Transform | 평행선 유지, 비율 유지, 6 자유도 |
| Projective Transform (Homography) | 평행선 유지 X, 8 자유도 |
| Inlier / Outlier | 모델에 잘 맞는 점 / 노이즈 점 |
| SVD (Singular Value Decomposition) | 최소제곱 해 계산 시 사용 |
| Feature Descriptor | 이미지 패치의 특징 벡터 표현 |
| FLANN (Fast Library for Approximate Nearest Neighbor) | 대규모 데이터셋의 빠른 매칭 |
🔍 요약 포인트
| RANSAC 절차 | ★★★★★ | ★★ | 서술형 |
| Homography 정의·조건 | ★★★★★ | ★★ | 서술형 |
| Least vs Total LS | ★★★★ | ★★★ | 비교형 |
| Image Stitching Pipeline | ★★★★ | ★★ | 순서형 |
| Feature Matching (BF/FLANN, Ratio test) | ★★★ | ★ | 개념형 |
| SVD로 H 계산 | ★★★ | ★★★ | 수식형 |
결론 요약
PPT 구성상, “RANSAC + Homography + Feature Matching”의 개념 및 절차를
서술하거나 비교하는 문제가 80% 이상일 가능성이 높습니다.
특히 “RANSAC 단계 나열”이나 “Homography가 유효한 조건 3가지”는 거의 단골 문제예요.
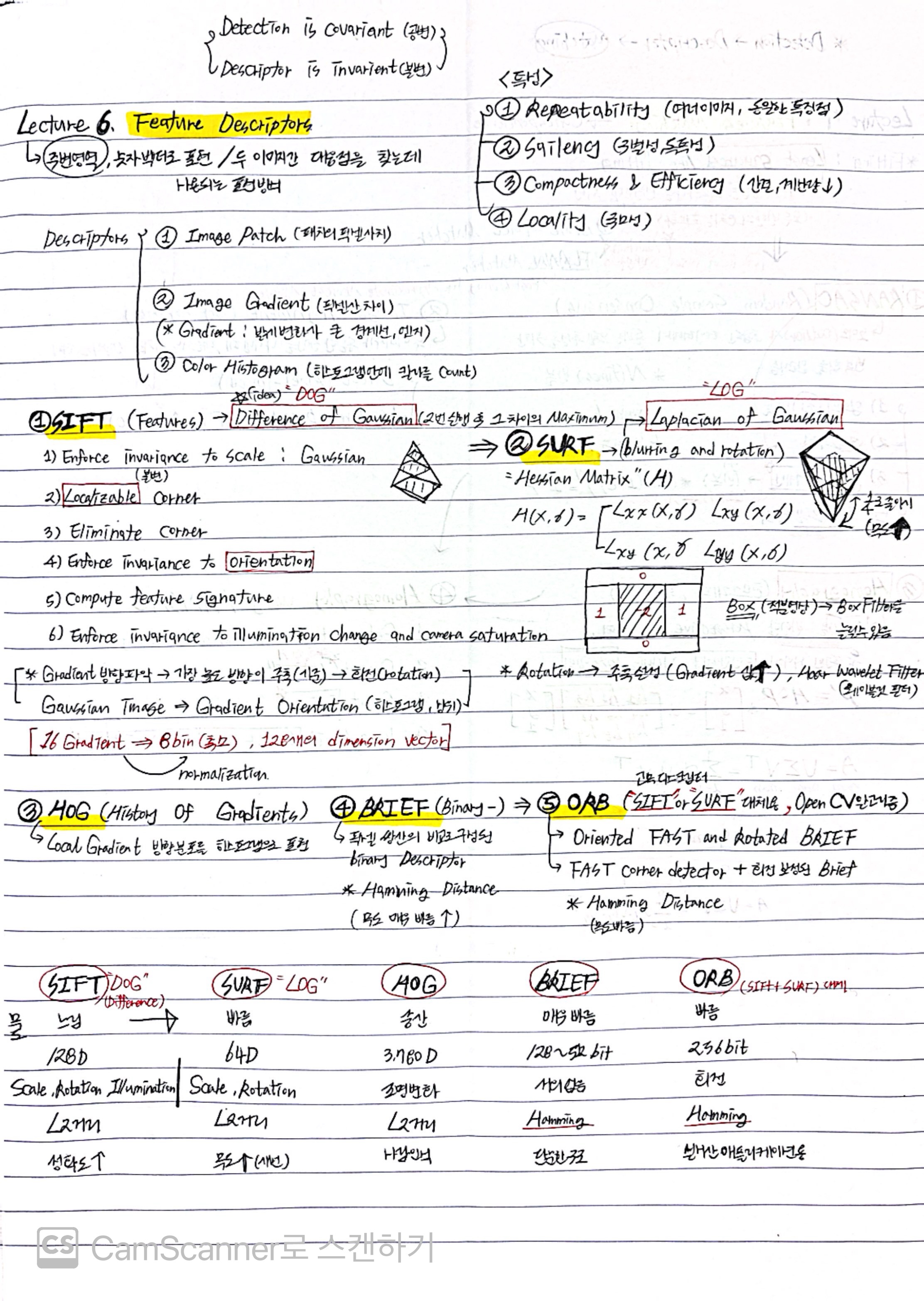
Lecture 6 : Feature Descriptors
이 강의는 한 줄로 요약하면
“어떻게 이미지의 특정한 점(특징점, feature)을 안정적으로 표현하고 비교할 것인가”
를 다룹니다.
🔹 1️⃣ Feature Descriptor의 기본 개념
💡 정의
Feature Descriptor란
이미지의 특정 지점(코너, 블롭 등)의 주변 영역(local region) 을
숫자 벡터 형태로 표현하여, 두 이미지 간의 대응점을 찾는 데 사용되는 정보 표현 방식입니다.
🧩 좋은 Descriptor의 조건 (슬라이드 5)
| Repeatability | 여러 이미지에서도 동일한 특징점을 검출할 수 있어야 함 |
| Saliency (Distinctiveness) | 다른 특징과 쉽게 구별될 만큼 독특해야 함 |
| Compactness & Efficiency | 계산량이 적고 표현이 간결해야 함 |
| Locality | 작은 지역만을 다루어 부분적 가림(occlusion)에 강해야 함 |
예상 문제 예시:
“좋은 Feature Descriptor가 갖추어야 할 4가지 특성을 설명하시오.”
🔹 2️⃣ Feature Matching의 기본 원리
💡 Matching의 핵심 아이디어
- 두 이미지에서 검출된 특징점들의 Descriptor를 비교하여
가장 비슷한(거리가 가까운) 특징 쌍을 찾는 것. - 단순한 템플릿 매칭은 회전, 크기, 조명 변화에 약함 → Invariant Descriptor 필요.
🚫 단순 이미지 패치의 한계 (슬라이드 7~11)
| Image Patch | 구현 간단 | 조명 변화에 민감 |
| Image Gradient | 조명 변화에는 강함 | 변형에 약함 |
| Color Histogram | 회전, 스케일 변화에 강함 | 다른 패치가 같은 히스토그램을 가질 수 있음 |
예상 문제 예시:
“Color Histogram을 Feature Descriptor로 사용할 때의 장점과 단점을 설명하시오.”
🔹 3️⃣ SIFT (Scale Invariant Feature Transform)
💡 핵심 개념
- 스케일, 회전, 조명 변화에 강인한(local invariant) 특징 디스크립터
- David Lowe (2004)
- 4단계로 구성:
1️⃣ Keypoint Detection (DoG)
2️⃣ Keypoint Localization
3️⃣ Orientation Assignment
4️⃣ Descriptor Generation
📍 주요 단계 요약
| 1. Scale-space extrema detection | Difference of Gaussian (DoG)로 각 스케일에서 극값 찾기 |
| 2. Keypoint localization | 엣지나 노이즈 점 제거 (Harris 응답, eigenvalue ratio 사용) |
| 3. Orientation assignment | 주변 gradient 방향 히스토그램으로 회전 불변성 부여 |
| 4. Descriptor generation | 4×4 셀 × 8방향 = 128차원 벡터 구성, 정규화로 조명 불변성 확보 |
💪 SIFT의 강점
- Scale, Rotation, Illumination Invariant
- 128D 고차원 벡터로 높은 구별력
- 실제로 OpenCV 등에서 “표준”으로 쓰임
예상 문제 예시:
“SIFT Descriptor의 구성 요소와 불변성(invariance) 확보 방법을 설명하시오.”
🔹 4️⃣ SURF (Speeded-Up Robust Features)
💡 핵심 개념
- SIFT보다 빠른 알고리즘 (3~7배 속도 ↑)
- Integral Image + Haar Wavelet 사용으로 연산 최적화
- Hessian 행렬의 Determinant로 코너(interest point) 검출
📍 특징 요약
| Detection | Hessian determinant로 keypoint 찾음 |
| Orientation | Haar wavelet response의 dominant orientation 계산 |
| Descriptor | 4×4 sub-region, dx/dy 응답 → Gaussian 가중 후 정규화 |
| 속도 이점 | Integral Image로 빠른 합산 계산 가능 |
| 한계 | 조명·뷰포인트 변화에는 다소 약함 |
예상 문제 예시:
“SIFT와 SURF의 차이점을 비교하시오.”
| 검출 방식 | DoG | Hessian determinant (box filter) |
| 불변성 | 강함 | 회전, 스케일에 강함 / 조명엔 약함 |
| 속도 | 느림 | 빠름 (3~7배) |
| 벡터 크기 | 128D | 64D |
🔹 5️⃣ HOG (Histogram of Oriented Gradients)
💡 정의
- 물체(특히 사람) 인식용 특징 기술자
- 이미지의 Local Gradient 방향 분포를 히스토그램으로 표현
- Dalal & Triggs (CVPR 2005)
📍 주요 단계
| 1. Gradient 계산 | X, Y 방향 필터로 미분 |
| 2. 셀(cell) 구성 | 8×8 픽셀 단위로 Gradient 방향 히스토그램 계산 |
| 3. 블록(block) 정규화 | 인접 셀 4개 묶어서 조명 보정 |
| 4. 특징 벡터 생성 | 모든 블록 히스토그램 연결 (64×128 이미지 → 3,780차원 벡터) |
예상 문제 예시:
“HOG 특징자가 조명 변화에 강한 이유를 설명하시오.”
→ 답: 블록 단위의 정규화(normalization) 과정 덕분.
🔹 6️⃣ BRIEF (Binary Robust Independent Elementary Features)
💡 핵심 아이디어
- 픽셀 쌍 간의 밝기 비교로 구성된 Binary Descriptor
- 연산이 매우 간단하고 빠름
- Hamming Distance (XOR) 로 비교
| 특징 표현 | 픽셀 쌍의 intensity 비교 결과(0/1) |
| 장점 | 계산 빠름, 메모리 적음 |
| 단점 | 회전·스케일 변화에 약함 |
| 비교 방법 | 해밍 거리 (Hamming Distance) |
예상 문제 예시:
“BRIEF Descriptor의 장단점을 각각 설명하시오.”
🔹 7️⃣ ORB (Oriented FAST and Rotated BRIEF)
💡 핵심 개념
- BRIEF를 개선한 SIFT/SURF 대체용 고속 디스크립터
- FAST corner detector + 회전 보정된 BRIEF
- OpenCV 기본 특징점 알고리즘
| 검출기 | FAST (빠른 코너 검출) |
| 디스크립터 | 회전 보정된 BRIEF |
| 장점 | SIFT·SURF 대비 빠름, 특허 문제 없음 |
| 비교 방법 | Hamming distance |
| 학습 기반 | 샘플링 쌍(256개)을 decorrelation 학습 |
예상 문제 예시:
“ORB 알고리즘의 구성 요소를 설명하시오.”
→ FAST + BRIEF + Orientation compensation.
🧠 보너스 정리 : Descriptor 비교표
| SIFT | 느림 | Scale, Rotation, Illumination | 128D | L2 거리 | 정확도 높음 |
| SURF | 빠름 | Scale, Rotation | 64D | L2 거리 | 속도 개선 |
| HOG | 중간 | 조명 변화 | 3,780D | L2 거리 | 사람 인식에 특화 |
| BRIEF | 매우 빠름 | 거의 없음 | 128~512bit | Hamming | 단순한 구조 |
| ORB | 빠름 | 회전 | 256bit | Hamming | 실시간 애플리케이션용 |
✅ 결론 요약
Lecture 6의 중간고사 출제 포인트는
“Descriptor의 정의·조건·종류별 특징·비교” 입니다.특히, 교수님이 SIFT, SURF, BRIEF, ORB의
차이점/공통점을 표 형식으로 설명하라는 문제를 자주 냅니다.
Lecture 5 : Local Feature Detection
🔹 1️⃣ Local Feature의 개념
💡 정의
Local Feature란
이미지의 일부(코너, 엣지, 블롭 등)에서 **특징적인 시각적 패턴을 가지는 점(Region of Interest)**을 말합니다.
→ 이미지 매칭, 스티칭, 트래킹 등에서 같은 물체의 동일한 지점을 식별하는 단서로 쓰입니다.
💬 Local Feature의 장점
| Locality | 국소 영역만 보기 때문에 부분 가림(occlusion)에 강함 |
| Distinctiveness | 각 특징점이 독특하여 구별력 있음 |
| Quantity | 한 이미지에서 수백~수천 개 검출 가능 |
| Efficiency | 병렬 계산으로 실시간 처리 가능 |
예상 문제 예시:
“Local Feature를 사용하는 이유를 3가지 이상 서술하시오.”
“Local Feature의 장점을 설명하시오.”
🔹 2️⃣ Feature Detection의 4가지 유형
| Edge Detection | 강한 밝기 변화 경계 검출 | Sobel, Prewitt, Canny |
| Line Detection | 같은 방향의 edge 연결 | Hough Transform |
| Corner Detection | 모든 방향에서 밝기 변화가 큰 점 | Harris, Shi–Tomasi |
| Blob Detection | 일정한 영역의 밝기/패턴 덩어리 | LoG, DoG (SIFT) |
팁 💡
시험에서는 "Edge, Corner, Blob의 차이"를 정의형으로 내는 경우가 많습니다.
예: “Corner와 Edge의 차이를 설명하시오.” → 방향 변화의 수로 설명 가능.
🔹 3️⃣ Edge Detection
💡 정의
- 밝기(gradient) 가 급격히 변하는 부분을 찾아 경계를 검출하는 기법.
- Edge = Intensity function의 1차 미분값이 큰 곳(극값)
🔧 대표 연산자 (Difference Operator)
| Prewitt | 간단한 필터 커널 (-1,0,1) | 계산 간단 | 노이즈 영향 큼 |
| Sobel | 중앙 가중치 ↑ | 노이즈 완화 | 속도 느림 |
| Roberts | 대각선 방향 | 간단 | 민감함 |
| Canny | 다단계 필터링 + 비최대 억제 + Hysteresis | 매우 정밀 | 느림 |
⚙️ Canny Edge Detector의 단계 (시험 단골!)
1️⃣ Gaussian 필터로 노이즈 제거
2️⃣ Gradient 크기 및 방향 계산
3️⃣ Non-maximum suppression (가장 강한 edge만 유지)
4️⃣ Hysteresis thresholding (이중 임계값으로 연결된 edge 추출)
예상 문제 예시:
“Canny Edge Detector의 4단계를 순서대로 기술하시오.”
“Non-maximum suppression 단계의 역할은 무엇인가?”
🔹 4️⃣ Line Detection (Hough Transform)
💡 정의
- 이미지에서 직선·원·곡선 같은 기하학적 형태를 검출하는 방법
- Edge point들을 파라미터 공간(ρ, θ)으로 변환 후 누적(accumulation)
- 직선 방정식:xcosθ+ysinθ=ρx\cosθ + y\sinθ = ρxcosθ+ysinθ=ρ
📘 개념 포인트
| Input | Edge 이미지 |
| Output | Line 파라미터 (ρ, θ)의 최대 투표값 |
| 장점 | 노이즈, 부분 가림에도 강함 |
| 단점 | 계산량 많음 |
예상 문제 예시:
“Hough Transform의 기본 원리를 설명하시오.”
“(ρ, θ) 공간에서 직선을 찾는 과정을 간단히 기술하시오.”
🔹 5️⃣ Corner Detection (Harris Corner Detector)
💡 아이디어
“창(Window)을 어느 방향으로 이동해도 픽셀 강도가 크게 변한다면, 그 지점은 코너!”
🧩 수학적 핵심

🧮 Eigenvalue 해석
| 둘 다 작음 | 변화 없음 | Flat |
| λ₁ ≫ λ₂ | 한 방향 변화 | Edge |
| λ₁, λ₂ 모두 큼 | 모든 방향 변화 | Corner |
⚙️ Harris 응답식
R=det(H)−k(trace(H))2R = \det(H) - k(\text{trace}(H))^2R=det(H)−k(trace(H))2
예상 문제 예시:
“Harris Corner Detector의 수식을 쓰고, λ₁, λ₂의 의미를 설명하시오.”
“Harris 응답식의 의미를 설명하시오.”
🔹 6️⃣ Invariance Properties (불변성)
| Translation | 위치만 이동 (Covariant) |
| Rotation | 형태 유지, 방향만 회전 (Covariant) |
| Intensity Shift (밝기 변화) | Invariant |
| Scale (크기 변화) | X (불변X) → 해결책: Scale-space Harris 또는 SIFT |
예상 문제 예시:
“Harris Corner Detector는 어떤 변환에 불변하며, 어떤 변환에는 취약한가?”
🔹 7️⃣ Blob Detection (LoG, DoG)
💡 정의
- **밝기나 질감이 비슷한 영역(덩어리)**을 찾아내는 방법
- 2차 미분(라플라시안)으로 검출:∇2G(x,y,σ)\nabla^2 G(x,y,\sigma)∇2G(x,y,σ)
📘 핵심 아이디어
- Blob = Edge의 교차점
- Laplacian-of-Gaussian (LoG) 필터로 여러 스케일(σ)에서 응답 확인
- 최대 응답값 위치 → Blob 중심,
σ 값 → Blob 크기(특징의 스케일)
⚡ 효율적 구현
- Difference of Gaussian (DoG) 로 근사
(SIFT에서 사용)
예상 문제 예시:
“Blob Detection에서 Scale Normalization이 필요한 이유를 설명하시오.”
“LoG와 DoG의 관계를 설명하시오.”
🔹 8️⃣ Scale Invariance와 Characteristic Scale
💡 개념
- “특징점의 크기(스케일)에 따라 같은 Feature를 찾아야 한다”
- 각 스케일(σ)별로 필터를 적용하고, 응답이 최대가 되는 σ를 특징의 고유 스케일로 정의.
예상 문제 예시:
“Scale-space에서 Feature의 characteristic scale을 정의하시오.”
🧠 요약 표
| Edge | Sobel, Prewitt, Canny | Gradient, Threshold | Rotation ○, Scale × |
| Line | Hough Transform | (ρ, θ) 누적 | Rotation ○ |
| Corner | Harris, Shi–Tomasi | Eigenvalue 분석 | Intensity ○, Scale × |
| Blob | LoG, DoG | Laplacian, σ | Rotation ○, Scale ○(if normalized) |
✅ 결론 요약
Lecture 5에서는 Edge → Line → Corner → Blob으로 이어지는
“로컬 피처 검출의 4단계 진화 과정”이 핵심입니다.중간고사에서는 Canny 단계, Harris의 H 행렬과 λ값 해석,
LoG와 DoG의 관계가 거의 반드시 한 문제 이상 출제됩니다.
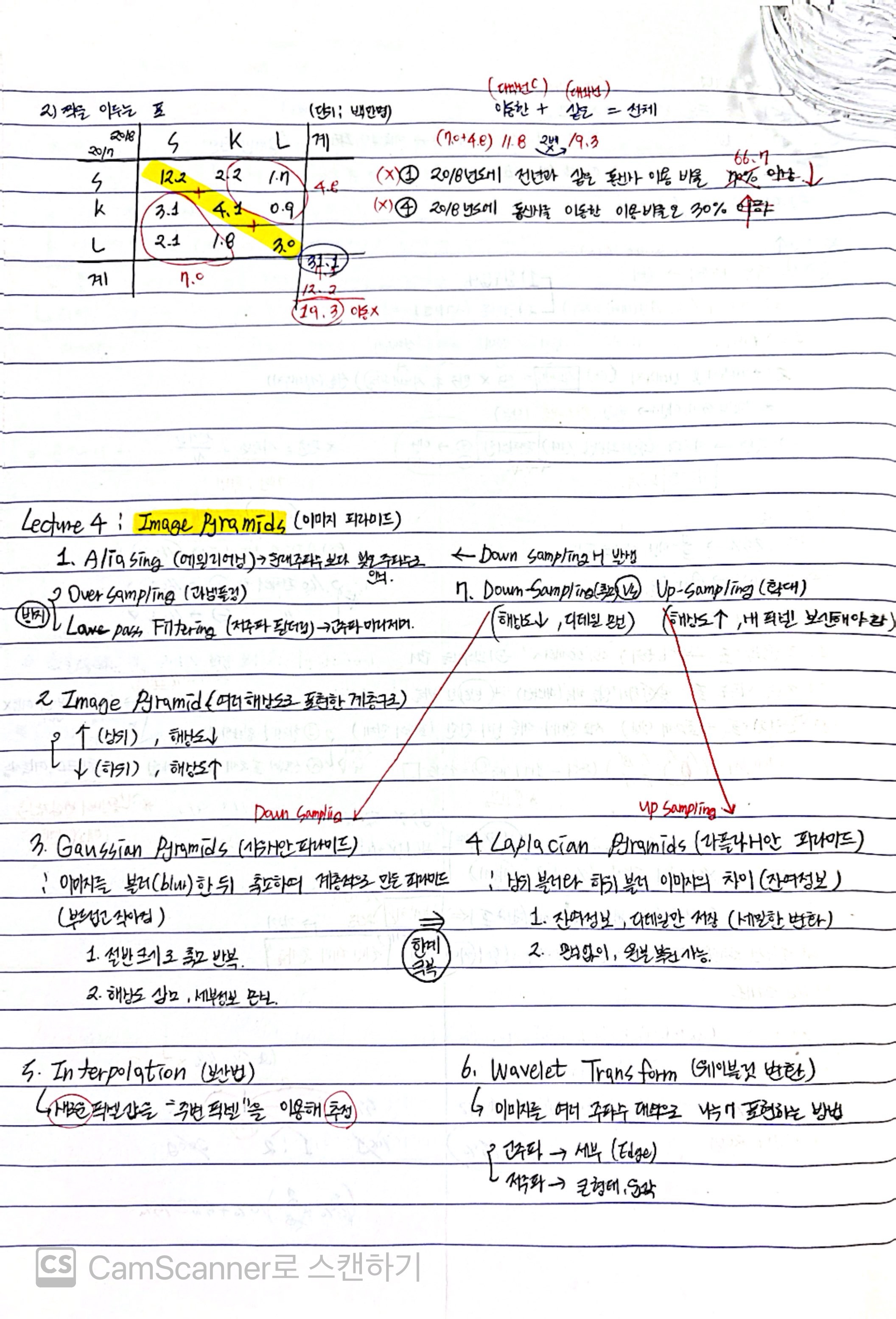
Lecture 4 : Image Pyramids
(중간고사 개념형 핵심 정리)
🔹 1️⃣ Aliasing (에일리어싱)
💡 개념
- 샘플링 간격이 너무 커서 원래 신호(또는 이미지의 세부 구조)를 정확히 표현하지 못할 때 생기는 왜곡 현상
- 즉, 원래 주파수보다 낮은 주파수로 잘못 인식되는 현상
🧠 쉽게 말하면
“복잡한 패턴을 너무 거칠게 찍으면 생기는 가짜 무늬”
예: 줄무늬 옷을 카메라로 찍을 때 생기는 물결무늬 (모아레 패턴)
📍 관련 개념
| Sampling | 연속 신호(이미지)를 일정 간격으로 측정하는 것 |
| Nyquist Rate | 원래 신호의 최대 주파수의 2배 이상으로 샘플링해야 정보 손실 없음 |
| Wagon Wheel Effect | 영화에서 바퀴가 거꾸로 도는 것처럼 보이는 현상 (에일리어싱의 예시) |
💡 에일리어싱을 막는 방법
1️⃣ Oversampling (과샘플링) → 더 자주 측정
2️⃣ Low-pass Filtering (저주파 필터링) → 고주파(세밀한 변화) 부분을 미리 제거
출제 예시:
“Aliasing이란 무엇이며, 이를 방지하는 두 가지 방법을 서술하시오.”
🔹 2️⃣ Image Pyramid (이미지 피라미드)
💡 개념
- 이미지를 여러 해상도(스케일) 로 표현한 계층 구조.
- 상위 레벨로 갈수록 해상도가 낮아지고(blurred),
하위 레벨은 세밀한 정보(원본) 을 가집니다.
📸 예시:
원본 이미지 (Level 0) → 절반 크기 (Level 1) → 1/4 크기 (Level 2) → 1/8 크기 (Level 3)
🔹 3️⃣ Gaussian Pyramid (가우시안 피라미드)
💡 개념
- 이미지를 블러(blur) 처리한 뒤 축소(subsample) 하여 계층적으로 만든 피라미드.
- 각 단계는 이전 이미지보다 부드럽고 작아짐.
🧩 핵심 아이디어
“작게 만들수록 세부정보는 사라지고 큰 구조만 남는다.”
🧠 특징 요약
| 구성 방식 | Gaussian 필터로 블러 → 절반 크기로 축소 반복 |
| 특징 | 해상도 감소, 세부정보 손실 |
| 장점 | 여러 스케일에서 특징을 다룰 수 있음 |
| 단점 | 원본 복원 불가 (정보 손실) |
출제 예시:
“Gaussian Pyramid의 개념을 설명하고, 왜 원본 이미지를 복원할 수 없는지 서술하시오.”
🔹 4️⃣ Laplacian Pyramid (라플라시안 피라미드)
💡 개념
- Gaussian Pyramid의 한계(복원 불가능)를 해결하기 위해 만든 “차이 피라미드”
- 각 단계에서 “상위 블러 이미지와 하위 이미지의 차이(잔여 정보)”를 저장합니다.
📘 즉,
원본 = (부드럽게 한 이미지) + (빠진 세부정보)
이걸 반복하면 원본을 재구성 가능.
🧠 핵심 포인트
| 보관하는 것 | 잔여(residual) 정보, 즉 디테일만 저장 |
| 장점 | 손실 없이 원본 복원이 가능 |
| 활용 | 이미지 압축, 이미지 블렌딩(예: 파노라마 합성) |
| 특징 | Gaussian Pyramid에 비해 “세밀한 변화”를 유지함 |
출제 예시:
“Laplacian Pyramid의 개념과 Gaussian Pyramid와의 차이를 설명하시오.”
핵심 한줄 비교:
Gaussian은 “계속 흐릿하게 만든 이미지”,
Laplacian은 “그 흐림 과정에서 빠진 정보(잔차)”를 저장한 이미지.
🔹 5️⃣ Image Pyramid의 필요성
💡 왜 여러 해상도로 이미지를 만들어야 할까?
- 객체나 패턴은 크기나 거리(스케일) 에 따라 다르게 보임.
- 따라서 여러 크기의 이미지에서 탐색하면 더 정확한 특징 검출이 가능.
📘 실제 활용 예시
| Object Detection | 큰 물체와 작은 물체를 모두 찾기 위해 여러 스케일 사용 |
| Image Stitching | 서로 다른 크기의 이미지 정합 |
| Noise Reduction | 고주파 노이즈 제거 후 복원 |
| Image Compression | 불필요한 세부 정보 제거 |
🔹 6️⃣ Interpolation (보간법)
💡 개념
- 이미지 크기를 키우거나 줄일 때,
새로운 픽셀 값을 “주변 픽셀”을 이용해 추정하는 방법.
📘 주요 방식
| Nearest Neighbor (최근접) | 가장 가까운 픽셀 값 복사 | 계단 현상, 빠름 |
| Bilinear (쌍선형) | 주변 4픽셀의 평균 | 부드러움 |
| Bicubic (3차 보간) | 주변 16픽셀 사용 | 가장 자연스러움, 느림 |
출제 예시:
“Bilinear Interpolation의 개념을 설명하고, Nearest Neighbor와의 차이를 서술하시오.”
🔹 7️⃣ Wavelet Transform (웨이블릿 변환)
💡 개념
- 이미지를 여러 주파수 대역(스케일) 으로 나누어 표현하는 방법.
- Laplacian Pyramid의 개념과 유사하지만, 수학적으로 더 일반화된 버전.
📘 이해 포인트
- 고주파 성분: 세부(Edge, Texture)
- 저주파 성분: 큰 형태, 윤곽
- 결과: 한 이미지 → 여러 주파수 영역으로 분리됨 (예: 수평, 수직, 대각선 성분)
활용 예: 이미지 압축, 노이즈 제거, 특징 추출
출제 예시:
“Wavelet Transform의 개념을 설명하고, Laplacian Pyramid와의 관계를 서술하시오.”
🔹 8️⃣ Down-sampling과 Up-sampling
| Down-sampling (축소) | 해상도 낮추기. 노이즈 줄지만 디테일 손실 |
| Up-sampling (확대) | 해상도 높이기. 새 픽셀을 보간해야 함 |
| 문제점 | Down-sampling 시 aliasing 발생 가능 |
🔹 9️⃣ 한눈에 보는 핵심 비교 요약표
| 핵심 개념 | Blur + Down-sample | 차이(Residual) 저장 | 확대 시 픽셀 추정 |
| 특징 | 부드러운 이미지 | 세부 정보 유지 | 화질 결정 |
| 복원 가능성 | ❌ 불가 | ✅ 가능 | N/A |
| 활용 | Multi-scale 분석 | 이미지 블렌딩, 압축 | 리사이징 |
| 유사 개념 | Smoothing, Scale-space | Edge detail 추출 | Upscaling |
🧩 교수님이 낼 법한 “개념형” 문제 예측 리스트
| 1️⃣ “Aliasing이란 무엇인가? 방지 방법은?” | Sampling 개념 + Low-pass filtering |
| 2️⃣ “Gaussian Pyramid의 개념을 설명하시오.” | Blur + Subsample, 정보 손실 |
| 3️⃣ “Laplacian Pyramid의 개념과 Gaussian Pyramid와의 차이점은?” | Residual 정보, 복원 가능성 |
| 4️⃣ “Image Pyramid의 필요성을 설명하시오.” | Scale variation 대응 |
| 5️⃣ “Interpolation의 종류와 차이를 간단히 설명하시오.” | Nearest / Bilinear / Bicubic |
| 6️⃣ “Wavelet Transform의 개념을 설명하시오.” | 주파수 분리 기반 표현 |
✅ 핵심 결론
“Image Pyramid는 이미지의 다중 스케일 표현(multi-scale representation) 개념이다.”
Gaussian은 단순한 축소 버전,
Laplacian은 차이(잔여 정보),
Interpolation은 크기 조정 기술.그리고 이 모든 개념은 Aliasing을 피하고,
다양한 크기의 객체를 효과적으로 처리하기 위한 기초이다.
Lecture 3 : Linear Filters (Cross-correlation, Convolution)
(중간고사 개념 중심 정리)
🔹 1️⃣ What is an Image? (이미지란?)
💡 기본 개념
- 디지털 이미지는 픽셀들의 2차원 격자(grid)
- 각 픽셀은 밝기(intensity) 값을 가짐 (0 = 검정, 255 = 흰색)
- 즉, 이미지는 함수 f(x, y) 로 볼 수 있음
→ (x, y): 좌표 / f(x, y): 그 지점의 밝기값
⚡ 추가 포인트
- 이미지는 공간(spatial) + 밝기(brightness) 두 영역에서 모두 이산화(discretized)
- 실제 이미지는 센서 노이즈, 조명 변화, 양자화(quantization) 등으로 인해 노이즈 포함
출제 예시:
“디지털 이미지를 함수의 형태로 표현할 수 있다고 할 때, f(x, y)의 의미를 설명하시오.”
🔹 2️⃣ Image Filtering의 개념
💡 정의
- 이미지의 각 픽셀 값을 주변 픽셀들과 결합하여 새로운 이미지를 만드는 과정
- 즉, 입력 이미지를 변형하거나 특징을 추출하기 위해 값의 범위를 바꾸는 작업
💬 목적
| 노이즈 제거 (Smoothing) | 흐림, 평균 필터, Gaussian filter |
| 특징 강조 (Enhancement) | Edge, Corner, Texture 강화 |
| 특징 추출 (Feature extraction) | 경계선, 모서리 검출 등 |
출제 예시:
“Image Filtering의 목적을 2가지 이상 서술하시오.”
“Filtering은 이미지의 ‘무엇’을 바꾸는가?”
→ 이미지의 픽셀 값의 범위(range) 를 바꾼다.
🔹 3️⃣ Filtering의 종류
| Point Operation | 픽셀의 위치와 무관하게, 해당 픽셀 값만으로 계산 | 밝기 조정, 감마 보정 |
| Neighborhood Operation (Filtering) | 주변 픽셀의 값과 함께 계산 | 블러링, 샤프닝, 노이즈 제거 |
📘 즉, 필터(Filter) 는 각 픽셀 주변의 값들을 가중합(weighted sum)으로 결합하는 과정입니다.
🔹 4️⃣ Linear Filter (선형 필터)
💡 개념
- 각 픽셀을 주변 픽셀의 선형 조합(linear combination) 으로 바꾸는 방식
- 이때 사용하는 가중치 집합이 커널(kernel) 또는 마스크(mask)
📘 예시:
- 3×3 커널을 모든 위치에 적용하여 새로운 이미지를 얻음
- 각 위치마다 커널이 동일하게 적용 → “Shift-Invariant”
🧠 핵심 개념 2가지
| Linearity (선형성) | 입력을 더하면 출력도 더해짐 (f₁ + f₂ → g₁ + g₂) |
| Shift Invariance (이동 불변성) | 필터의 동작이 위치에 따라 바뀌지 않음 |
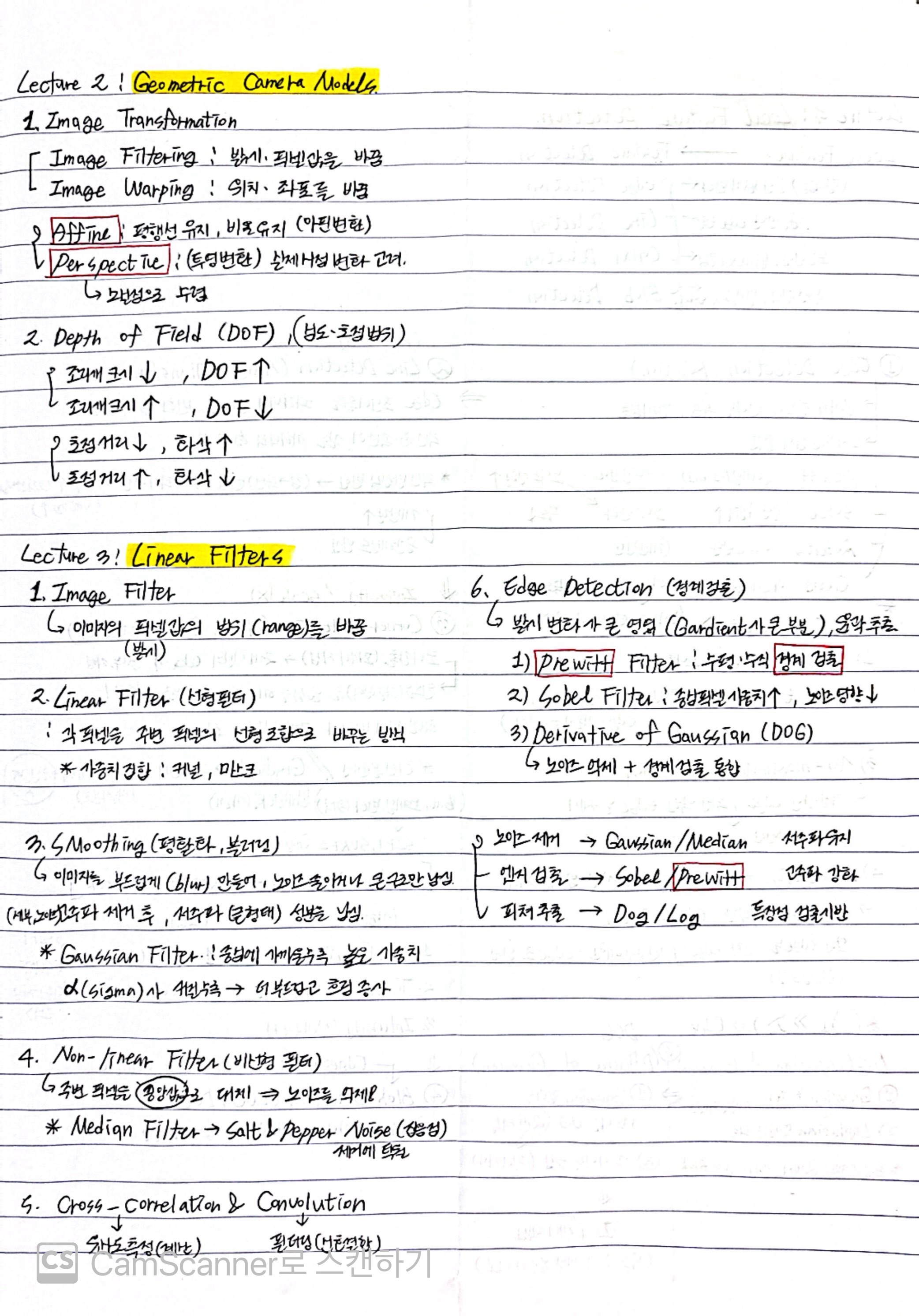
🔹 5️⃣ Smoothing (평활화, 블러링)
💡 개념
- 이미지를 부드럽게(blur) 만들어 노이즈를 줄이거나 큰 구조만 남기는 필터링
- 고주파 성분(세부, 노이즈)을 제거하고, 저주파 성분(큰 형태)을 남김
📘 대표 필터
| Box Filter (Mean Filter) | 주변 픽셀의 단순 평균 | 간단하지만 엣지 흐림 발생 |
| Gaussian Filter | 중심에 가까울수록 높은 가중치 | 자연스러운 블러, 엣지 손상 적음 |
💡 Gaussian Filter의 특징
- 중심 픽셀에 가장 큰 가중치, 주변으로 갈수록 작아짐
- σ (sigma) 값이 커질수록 → 더 부드럽고 흐림 증가
- Rotationally symmetric (회전 대칭적)
- 연속적인 스무딩 효과를 가짐
출제 예시:
“Gaussian Filter가 Box Filter보다 나은 이유를 설명하시오.”
→ 중심 가중치가 크고, 자연스러운 스무딩이 가능하기 때문.
🔹 6️⃣ Kernel Size의 영향
| 작은 커널 | 빠르지만 노이즈 제거 약함 |
| 큰 커널 | 부드럽지만 디테일 손실, 연산량 증가 |
출제 예시:
“필터 커널의 크기가 커질 때 이미지에 어떤 변화가 생기는가?”
→ 노이즈는 줄지만 엣지가 흐려지고, 계산량이 커진다.
🔹 7️⃣ Non-linear Filter (비선형 필터)
💡 개념
- 픽셀 값을 평균이 아닌 ‘중앙값’이나 특정 규칙으로 결정
- 선형 결합이 아니므로 단순한 합산·평균이 아님
📘 대표 예시: Median Filter
| 원리 | 주변 픽셀을 정렬 → 중앙값으로 대체 |
| 장점 | Salt & Pepper Noise (잡음 점) 제거에 탁월 |
| 단점 | 연산량 많음, 경계선 일부 손상 |
비교:
- Mean Filter는 평균값 → 노이즈가 번짐 (spread noise)
- Median Filter는 중앙값 → 노이즈를 억제 (remove spikes)
출제 예시:
“Median Filter가 Mean Filter보다 노이즈 제거에 효과적인 이유를 설명하시오.”
→ 평균은 극단값(outlier)에 영향을 받지만, 중앙값은 영향을 받지 않기 때문.
🔹 8️⃣ Convolution vs Cross-Correlation
💡 공통점
- 모두 필터를 이동시키며 픽셀과 곱하고 더하는 연산
- 이미지 처리에서 두 연산의 결과는 거의 유사
💬 차이점
| 커널 방향 | 그대로 사용 | 상하·좌우 반전 후 사용 |
| 의미 | 유사도(same pattern) 측정 | 신호 결합(Filtering) |
| 수학적 특징 | 대칭 아님 | 대칭적 (commutative) |
출제 예시:
“Cross-correlation과 Convolution의 차이를 개념적으로 설명하시오.”
→ 전자는 유사도 계산, 후자는 필터링(신호 결합) 과정.
🔹 9️⃣ Edge Detection (경계 검출)
💡 개념
- 밝기 변화가 큰 영역(Gradient가 큰 부분) 을 찾아 물체의 윤곽을 추출하는 과정
- “필터링 + 미분” 개념의 결합
⚙️ 대표 필터
| Prewitt Filter | 간단한 수평·수직 경계 검출 |
| Sobel Filter | 중심 픽셀 가중치 ↑ → 더 안정적 |
| Derivative of Gaussian (DoG) | 노이즈 억제 + 경계 검출 통합형 |
출제 예시:
“Sobel Filter가 Prewitt Filter보다 안정적인 이유는?”
→ 중심부 픽셀의 가중치를 높여 노이즈 영향을 줄였기 때문.
🔹 10️⃣ Filtering의 실제 의미 정리
| Low-pass filtering | 부드럽게 함 (노이즈 제거) |
| High-pass filtering | 날카롭게 함 (엣지 강화) |
| Band-pass filtering | 특정 주파수 대역만 유지 |
| Linear filtering | 주변 픽셀의 선형 조합 |
| Non-linear filtering | 중앙값 등 규칙 기반 조합 |
🔹 11️⃣ 실무 활용 예시
| 노이즈 제거 | Gaussian / Median | 저주파 유지 |
| 엣지 검출 | Sobel / Prewitt | 고주파 강화 |
| 디테일 강화 | Sharpening Mask | 원본 + (원본 - Blur) |
| 피쳐 추출 | DoG / LoG | 특징점 검출 기반 |
🔹 12️⃣ 개념형 시험 예상 문제 요약표
| 1️⃣ Image Filtering의 목적 | Noise Reduction, Feature Extraction |
| 2️⃣ Linear Filter의 개념 | Weighted sum of neighborhood |
| 3️⃣ Gaussian vs Box Filter | 자연스러움, 중심 가중치 |
| 4️⃣ Median Filter의 특징 | Outlier 제거, Spike Noise 대응 |
| 5️⃣ Convolution vs Correlation | 커널 반전 여부, 의미적 차이 |
| 6️⃣ Edge Detection의 목적 | Gradient 변화, 윤곽 추출 |
| 7️⃣ 필터 크기의 영향 | 크면 부드럽지만 디테일 손실 |
✅ 핵심 결론
“Linear Filter는 이미지를 주변 픽셀과의 관계를 기반으로 변형하여
노이즈를 줄이거나 엣지를 강조하는 가장 기본적이고 필수적인 영상처리 방법입니다.”중간고사에서는 ‘개념 정의 + 차이 설명 + 장단점 비교’ 형태로 출제됩니다.
수식보다 “왜 사용하는가 / 어떤 효과가 있는가” 를 중심으로 정리하세요.
Lecture 2 : Geometric Camera Models (기하학적 카메라 모델)
(중간고사 개념 중심 정리)
🔹 1️⃣ Image Formation (영상 형성의 기본 구성 요소)
💡 이미지가 형성되는 4가지 요소
| Geometry (기하학) | 3D 세상 속 점이 2D 이미지로 어떻게 투영되는가 | “위치 관계” |
| Radiometry (방사측정학) | 물체 표면에서 나오는 빛의 양과 카메라에 도달하는 빛의 관계 | “빛의 물리량” |
| Photometry (광도 측정) | 사람이 볼 수 있는 빛의 강도(intensity) | “밝기 측정” |
| Digitization (디지털화) | 연속적인 빛 신호를 디지털 픽셀 값으로 변환 | “아날로그 → 디지털” |
출제 포인트:
“Image formation에 영향을 미치는 네 가지 요소를 설명하시오.”
🔹 2️⃣ Image Transformation (영상 변환)
💡 개념
- 이미지를 좌표계 관점에서 변환하는 것
- 즉, 이미지의 형태나 위치를 바꾸는 기하학적 조작
📘 구분:
| Image filtering | 밝기(값)의 변화 → 픽셀 값(range) 을 바꿈 |
| Image warping | 위치(좌표)의 변화 → 좌표(domain) 를 바꿈 |
🔹 3️⃣ 2D Transformations (2차원 변환의 종류)
| Rigid (강체 변환) | 거리와 각도 유지 (회전 + 이동) | 형태, 크기, 평행성 |
| Similarity (유사 변환) | 거리 비율 유지 (스케일링 + 회전 + 이동) | 형태 유지, 크기 변화 |
| Affine (아핀 변환) | 평행성 유지 (shear, stretch 포함) | 평행선 유지, 비율 유지 |
| Perspective (투영 변환) | 실제 시점 변화 고려 (원근 포함) | 직선 유지, 평행성은 깨짐 |
출제 예시:
“Affine Transformation과 Perspective Transformation의 차이를 개념적으로 설명하시오.”
→ Affine은 평행선 유지, Perspective는 평행선이 소실점(vanishing point)으로 모인다.
🔹 4️⃣ Homogeneous Coordinates (동차 좌표)
💡 개념
- 2D 좌표 (x, y)에 한 차원(w) 을 추가한 표현 방식
- 변환을 행렬 하나로 통합할 수 있게 해줌
예:
- 일반 좌표 (x, y) → 동차좌표 (x, y, 1)
- 변환 후 다시 (x/w, y/w)로 나눠서 복원
핵심 포인트:
“Translation(이동)은 선형변환이 아니지만, Homogeneous Coordinates를 사용하면 행렬 형태로 표현 가능하다.”
🔹 5️⃣ Affine vs Perspective Transformation (개념 비교)
| 선형성 | 유지됨 | 깨짐 |
| 평행선 | 유지됨 | 소실점으로 수렴 |
| 비율 | 유지됨 | 왜곡 발생 |
| 원근 효과 | 없음 | 있음 |
| 적용 예시 | 평면 이미지 변환 | 카메라 투영, 시점 변화 |
출제 예시:
“Perspective Transformation에서 평행선이 소실점으로 모이는 이유를 설명하시오.”
🔹 6️⃣ Camera Coordinate System (카메라 좌표계)
💡 두 가지 좌표계
| World Coordinate System | 실제 3D 세상 속 물체의 좌표계 |
| Camera Coordinate System | 카메라 중심을 기준으로 한 좌표계 |
즉, 카메라의 위치와 방향에 따라
3D 점이 어떻게 2D 이미지로 사상되는가를 정의하는 것이 목적입니다.
🔹 7️⃣ Projection (투영의 개념)
💡 정의
3차원 공간의 점을 2차원 평면(이미지)으로 “던지는” 과정
📘 투영의 성질
| Point → Point | 각 점은 하나의 픽셀로 투영됨 |
| Line → Line | 직선은 여전히 직선으로 보임 |
| Plane → Plane/Line | 평면은 평면이나 선으로 보일 수 있음 |
| Parallel Lines → Vanishing Point | 원근감에 따라 평행선이 한 점에서 만남 |
출제 예시:
“투영 변환에서 평행선이 평행하게 유지되지 않는 이유를 설명하시오.”
→ Perspective Projection에서는 깊이(z)에 따라 비례 왜곡이 생기기 때문.
🔹 8️⃣ Pinhole Camera Model (핀홀 카메라 모델)
💡 개념
- 3D 세상의 한 점에서 오는 빛이 카메라의 한 점(투영 중심)을 통과하여 2D 평면에 맺히는 모델
- 즉, 카메라를 “빛이 지나가는 구멍(핀홀)”로 이상화한 단순 모델
🧠 특징 요약
| 구성 | 한 개의 구멍 + 이미지 평면 |
| 결과 | 상이 상하좌우로 뒤집힘 |
| 장점 | 초점 불필요, 왜곡 없음 |
| 단점 | 빛이 적게 들어옴 → 어두움, 노이즈 큼 |
출제 예시:
“핀홀 카메라의 이미지가 뒤집혀 보이는 이유를 설명하시오.”
🔹 9️⃣ Lens Camera Model (렌즈 카메라)
💡 렌즈 추가의 목적
핀홀 카메라의 단점을 해결하기 위해 렌즈로 빛을 모아 초점(focus) 을 맞춤.
| Lens (렌즈) | 빛을 굴절시켜 초점을 맞춤 |
| Focal Point (초점) | 평행광선이 모이는 지점 |
| Aperture (조리개) | 빛의 양과 심도(Depth of Field)를 조절 |
| Film/Sensor Plane | 이미지가 맺히는 평면 |
출제 예시:
“렌즈를 사용하는 이유를 핀홀 카메라와 비교하여 설명하시오.”
→ 더 많은 빛을 받아들이고, 초점 맞추기 가능.
🔹 🔟 Depth of Field (심도, 초점 범위)
💡 개념
- 렌즈로 인해 하나의 거리만 완벽히 초점이 맞지만,
그 주변 범위도 어느 정도 “선명하게” 보이는 구간이 존재함.
→ 이를 Depth of Field (DOF) 라고 함.
| 조리개 크기 ↓ (작게) | DOF ↑ (더 넓은 범위 초점) |
| 조리개 크기 ↑ (크게) | DOF ↓ (좁은 범위만 초점) |
출제 예시:
“조리개 크기와 Depth of Field의 관계를 설명하시오.”
🔹 11️⃣ Field of View (화각)
💡 개념
- 카메라가 한 번에 볼 수 있는 공간의 각도
- 초점 거리(focal length) 가 작을수록 → 화각이 넓어짐
(광각렌즈) - 초점 거리가 길수록 → 화각이 좁아짐
(망원렌즈)
📘 정리:
| 짧음 | 넓음 | 광각 |
| 김 | 좁음 | 망원 |
출제 예시:
“Focal length가 커질수록 Field of View는 어떻게 변하는가?”
🔹 12️⃣ Camera Parameters (카메라 파라미터)
| Intrinsic Parameters (내부 파라미터) | 카메라 내부의 광학적 특성 (초점 거리, 주점 위치 등) | 픽셀 좌표 변환 |
| Extrinsic Parameters (외부 파라미터) | 카메라의 위치와 방향 (R, t) | 월드좌표 → 카메라좌표 |
출제 예시:
“Intrinsic과 Extrinsic 파라미터의 차이를 개념적으로 설명하시오.”
🔹 13️⃣ Lens Distortion (렌즈 왜곡)
| Barrel Distortion (배럴형) | 바깥쪽으로 팽창 | 〰️ 외곽부 팽창 |
| Pincushion Distortion (핀쿠션형) | 안쪽으로 오목 | 〰️ 중앙부 압축 |
📘 원인: 렌즈의 곡률(굴절률)이 완벽하지 않아 생김
📸 보정: 보정 함수나 캘리브레이션으로 수정 가능
출제 예시:
“Radial Distortion의 두 가지 형태를 설명하고, 왜 발생하는지 기술하시오.”
🔹 14️⃣ Perspective Distortion (원근 왜곡)
💡 개념
- 카메라의 시점이 수직이 아닐 때
세로선이 한 점(소실점)으로 모이는 현상 - 건축 사진에서 흔히 나타남
해결 방법:
- 렌즈 시프트 또는
- Perspective Rectification (투영 보정) 사용
출제 예시:
“Perspective Distortion이란 무엇이며, 이를 보정하는 방법을 설명하시오.”
🔹 ✅ 한눈에 보는 핵심 요약표
| Rigid | 회전 + 이동 | 거리, 각도 | 없음 |
| Similarity | 스케일 포함 | 형태, 비율 | 절대 크기 |
| Affine | 평행선 유지 | 평행성, 비율 | 원근감 |
| Perspective | 실제 투영 | 직선 | 평행선, 비율 |
✅ 결론 요약
“Geometric Camera Model은 3D 세계의 점이
카메라를 통해 2D 평면으로 어떻게 투영되는지를 설명하는 기본 틀이다.”중간고사에서는 Pinhole Camera, Lens Model, DOF, FOV, Affine vs Perspective 차이가
거의 반드시 개념형 문제로 나옵니다.
'개인 프로젝트 > 대학원 수업 정리' 카테고리의 다른 글
| [기초통계] 중요 과제 (0) | 2025.10.28 |
|---|---|
| [중간고사] Computer Vision (0) | 2025.10.16 |
| 컴퓨터와 비전 (0) | 2025.10.14 |
| 인공지능 수학 (0) | 2025.10.13 |
| [Python] (1) Computer Vision_과제 (0) | 2025.10.09 |


댓글